|




| Quantity: | |
|---|---|
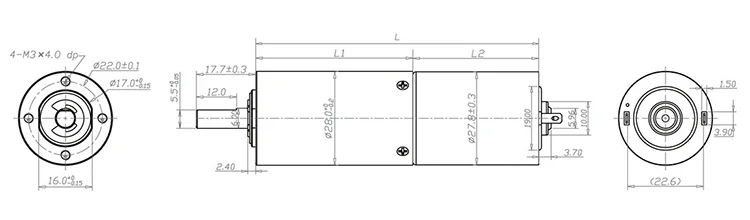
ZWBMD028028
Ritscher
Brushless motor is a high-efficiency, low-maintenance electric motor. Its core working principle is to replace the mechanical commutation of traditional brushless electronic motors with electronic commutation. Brushless motors are usually composed of multiple coils (also called stator windings) and permanent magnet rotors. These coils need to be energized and de-energized in a specific timing sequence to generate a rotating magnetic field to drive the rotor to rotate. In the drive circuit of the brushless motor, transistors (such as MOSFET or IGBT) or other electronic switching devices play a key role. They are responsible for accurately controlling the on and off state of each coil. The pulse width modulation (PWM) signal is used to adjust the on and off time of these switching devices, thereby achieving fine control of the motor speed, torque and energy efficiency.
The stator of a brushless electronic motor usually consists of three or more groups of coils, which are arranged in a star (Y type) or triangle (Δ type) connection. Each group of coils is distributed at a certain angle in space (for example, each group of coils in a three-phase brushless motor is 120 degrees apart) to ensure that the magnetic field can rotate evenly. The rotor is made of permanent magnets (such as neodymium magnets), and its number of poles matches the magnetic field changes of the stator coils.
The operation of brushless electronics depends on electronic commutation, which is to activate and deactivate the coils in a specific order through external circuits. For example, in a three-phase brushless motor, the drive circuit will energize the three-phase coils A, B, and C in sequence to generate a rotating magnetic field. This process requires precise timing control, which is usually implemented by a motor controller (such as ESC, Electronic Speed Controller) or a microcontroller (MCU). The controller determines the next set of coils to be energized based on the rotor position (determined by Hall sensors or back EMF detection).
In the drive circuit, transistors (such as N-channel or P-channel MOSFETs) are the core components. Each coil is usually controlled by one or more transistors to form a half-bridge or full-bridge circuit (such as a three-phase full-bridge drive). The on and off states of the transistors directly determine whether the coils are energized. For example, in a three-phase full-bridge drive, the transistors of the upper and lower arms need to work in pairs to avoid short circuits and ensure unidirectional current flow.
The PWM signal controls the effective conduction time of the transistor by adjusting the duty cycle. The higher the duty cycle, the greater the average voltage and current of the coil, which generates a stronger magnetic field, and the motor output torque and speed also increase. The frequency of PWM is usually high (several thousand hertz to tens of kilohertz) to avoid audible noise and improve control accuracy. In addition, PWM can also be used to implement functions such as soft start, dynamic braking, and energy recovery.
Modern brushless motor drives usually use advanced control algorithms such as sinusoidal drive (FOC, Field-Oriented Control) or trapezoidal wave drive (Trapezoidal Commutation). These algorithms reduce torque pulsation and noise and improve energy efficiency by optimizing PWM waveforms and commutation timing. For example, FOC realizes vector control of the magnetic field by decomposing the current into magnetic field generation components and torque generation components, making the motor run smoother and more efficient.